手撸神经网络 (2)
单个感知机和线性分类器
虽然现在还只是“单细胞生物”的形态,但我们即将赋予单感知机基本的功能:一个线性分类器。

如上图所示,蓝、绿点分别代表两个类别,红线划分出了分类的4个形态。解决这类问题,派出一个感知机就够了。
分类是机器学习中一种典型的“有监督学习”,这意味着算法对于预测对象的能力会被随时评估。当我们提到预测的能力时,通常指的是算法犯错误的程度。
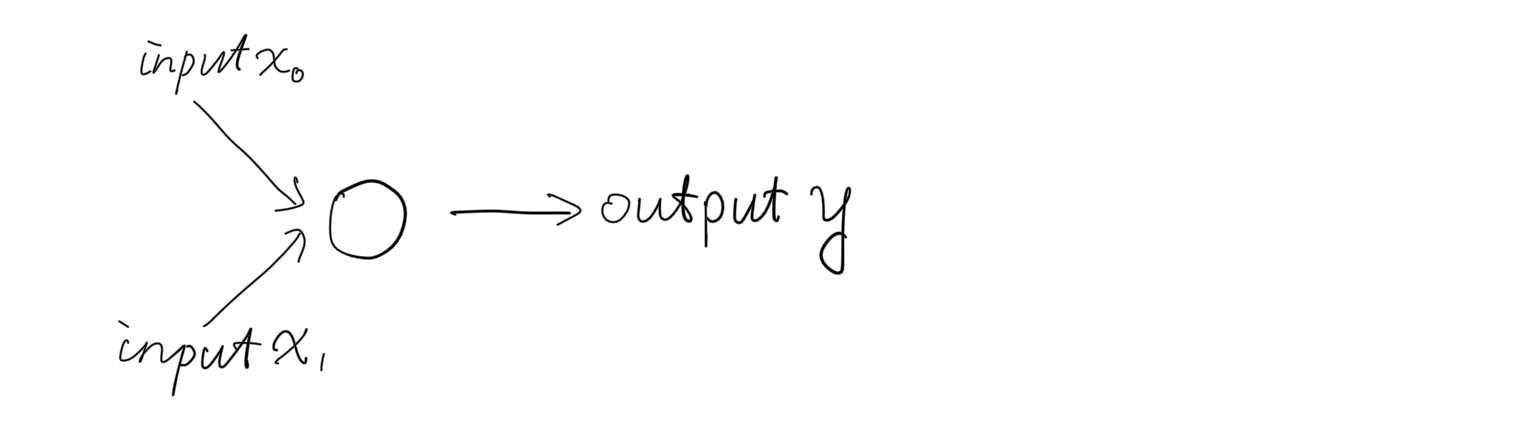
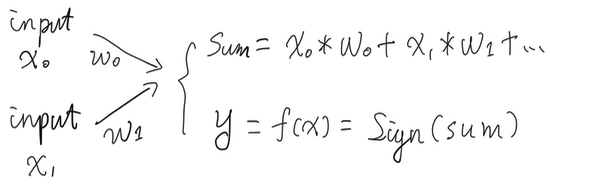
让我们再次回顾一下输入和输出:
- 输入 (2个入参,所以选择两个入参是因为适应转化为x和y坐标从而表现为平面上的点的形式);
- 权重 (初始化为-1~1之间的随机数值);
- 输出 (通过符号函数转化为-1和1);
目标是让感知机能够接受平面上的任意一点作为输入,输出分类的结果:-1 或者 1. 需要训练的参数是权重,使它能够帮助我们正确地分类。
就好象开车的时候,重要的是确保行驶方向的正确性,在算法训练过程中,正确的方向来自于,对于“错误的评估”。
| Actual | Predict | Actual - Predict |
|---|---|---|
| 1 | 1 | 0 |
| 1 | -1 | 2 |
| -1 | -1 | 0 |
| -1 | 1 | -2 |
以上是对于感知机对于输入和判断结果的四种状态的罗列,特别的,第2和第4行代表机器判断错误,即 “Actual” 和 “Predict” 不相符合。 我们使用了一个简单的式子来描述错误的程度:
Error = Actual - Predict
前面提到,权重是提升算法分类准确率的关键,我们对于权重的计算方式如下:
Weights += Errors * Inputs * Learning_rate
Learning_rate 学习率 是神经网络中的一个超参数, 代表着学习的速率, 简言之, 它是当前的权重向当前的错误的“屈服的程度”,它越倾向于承认当前的错误,那么它的学习的速度也将越快(然而这也并非全是好事,后面再展开)。
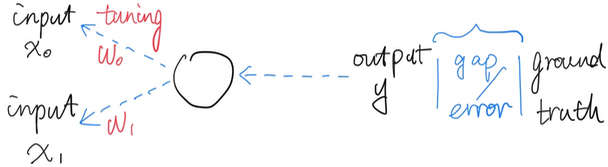
内部运作原理:
比较当前的输出和真实的分类结果,得到当前的错误程度,把错误信息向前(网络开始的地方)传递,进而对于权重进行调整,从而让最后的输出能够越来越符合输入的样本,神经网络中称为“反向传播”。
这一过程也典型地体现了,神经网络能够从“错误”中学习。
举个例子: 下面是一个前向传播的例子,2个输入分别是 0.5 和 1,两个随机赋予的权重分别是 0.1 和 -0.5,感知机输出的分类结果是 -1.
| Inputs | Original weights | Sum(inputs * weights) | Sign outputs |
|---|---|---|---|
| 0.5 | 0.1 | 0.5 * 0.1 | |
| 1 | -0.5 | 1 * -0.5 | |
| 0.05 - 0.5 | -1 |
假如对于输入 0.5 和 1,期望的正确分类是1 而非上面的 -1,我们来看反向传播是如何对权重进行训练的:
| Errors | Inputs | Learning_rate | New Weights | Original weights |
|---|---|---|---|---|
| 1 - (-1) | 0.5 | 1 | 2 * 0.5 * 1 | 0.1 |
| 1 - (-1) | 1 | 1 | 2 * 1 * 1 | -0.5 |
两个随机赋予的权重组合 0.1 和 -0.5,随着反向传播的进行,它们被调成了 1 和 2,尤其是后者,从-0.5被放大为2,也就是神经网络现在认为,后者(第2个输入)比前者更为重要。通过权重的调整,车子行进的方向也随之被调整了。
(注意: 为了方便演示,使用了 1 作为学习率,在实践当中,学习率通常是个远小于1的数值)
接下来代码实现:
在上一期代码的基础上,我们在感知机对象中添加一个训练函数:
class Perceptron {
float[] weights;
float learning_rate = 0.01;
float bias = 1.0;
// Constructor, takes in # of weights and initialize
Perceptron(int n) {
weights = new float[n];
for (int i = 0; i < weights.length; i++) {
weights[i] = random(1, 2);
}
}
// Generate outputs
int predict(float[] inputs) {
float sum = 0;
for (int i= 0; i < weights.length; i++) {
sum += inputs[i] * weights[i];
}
int predict = sign(sum);
return predict;
}
// Training process
void train(int label, float[] inputs) {
int predict_result = predict(inputs);
int error = label - predict_result;
if (predict_result == error) {
return;
}
for (int i = 0; i < weights.length; i++) {
// tune the weight based on previous result and basis
weights[i] += inputs[i] * error * learning_rate;
}
}
// used to plot classification line
float guessY(float x) {
//w0 * x + w1 * y + w2 * bias = 0;
return -weights[2] * bias / weights[1] -weights[0] * x / weights[1];
}
// Activate function, sign is a basic function gets "+" / "-"
int sign(float sum) {
if (sum >= 0) {
return 1;
} else {
return -1;
}
}
}
说明, 我们使用了输出 \(output = input *weight + bias* weight\) 在代码实现中,bias 预设为 1。
下面的动图说明了单个感知机是如何执行分类工作的,红点代表错误的分类,绿点代表正确的分类,黑色的线条代表分类函数,即之前所述的 \(y = kx + b\) 的形式。这个一次函数把整个2D平面一分为二,象征两个类别的分界线。红色表明了在神经网络在一次次迭代的过程中的学习过程。
Learning rate 学习率决定了图中红线移动的速度和幅度,相对小的学习率占用了更多的训练时间,相对大的学习率则刚好相反。但是把学习率设得过大,将有可能使错过最优解。在训练大型神经网络的时候,经验之谈是,在起始把学习率调得大一些,然后再逐步调小,以期在学习速度和学习效果之间求取平衡。但是在实践中,学习率的设置仍然更象是一门“艺术”而非纯粹的“科学”。
通过把训练的过程可视化,我们还可以观察到更多有意思的现象,比如,在训练中我们对于权重的表达式:
Weight += error * learing_rate * input
为什么使用“ += ” 进行累加,如果把其中的 “+” 号移除,会发生什么?
Weight = error * learning_rate * input
下面的动图就是移除+号以后的训练过程,观察图中“红线”的移动路径:
图中的“红线”看起来完全迷失了正确的方向,它的移动变得非常随机。反映在训练过程中,在去除了“+”号以后,感知机失去了从先前的错误中学习的能力,意味着每次它都是从头开始学起,而没有站在之前的自己的肩膀上。
原先代码中的小小的“+”,帮助了感知机能够慢慢地把先前的错误和经验积累起来,从而让自己慢慢地进步,这和人类的学习真像啊。
如你所见,这就是使用 Processing / JavaScript 等代码写神经网络程序的好玩的地方,可以通过自己调整代码,来观察整个训练过程,获得更直观的理解。
如果你想重现第一个动图中的结果,下面是使用的参数:
-
训练准确率: 从 0.95 到 1.0。 在初始的100个点中,0.95意味着有5个点的类别被分错了,随着训练的进行被提升到百分之百的准确率。
-
权重0: 第一个输入的权重, -0.278
-
权重1: 第二个输入的权重, 0.054
-
权重2: 和bias相乘, 0.113
训练准确率帮助我们追踪训练过程的有效性,权重是从我们“喂”给神经网络的数据当中学习得到的。为了帮助进一步理解权重的含义,让我们随机写一个目标函数,然后看看神经网络如何执行它功能:线性拟合。
假设目标函数是: \(y = 5*x -2\) 即我们是根据此函数造出“训练数据”并喂给神经网络进行学习的。
根据:
\[weight_0*x + weight_1*y +weight_2*bias = 0\]代入权重:
\(-0.278x + 0.054y + 0.113 = 0\) (bias取1)
化简整理:
\[54y = 278x - 113\] \[y = 5.148x - 2.09\]和目标函数非常接近。
上述过程,目标是为了拟合一个函数,让最终的结果尽可能地接近目标函数。

随着训练的完成,产出就是基于训练数据的权重数据,在线性分类器的情况下,就是拟合出的函数的斜率和目标函数的斜率尽可能相近。
上面就是世界上最简单的神经网络,只有一个神经元的单个感知机,能够做的了不起的事情。 如果我们手上有两个感知机,世界会有不同吗?